
Exo 5
Commencez par chercher à résoudre l'exercice par vous-même.
Si vous manquez d'idée pour débuter, consultez l'indice fourni et recommencez à chercher.
Une solution détaillée vous est ensuite proposée.
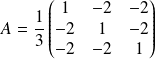
Soit
 l'endomorphisme de
l'endomorphisme de
 de matrice
de matrice
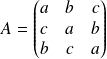 dans la base canonique.
dans la base canonique.
Question
Déterminer les réels
 ,
,
 et
et
 pour que
soit un endomorphisme orthogonal.
pour que
soit un endomorphisme orthogonal.
Un endomorphisme est orthogonal si et seulement si il transforme une base orthonormale en base orthonormale.
L'endomorphisme
est orthogonal si et seulement si
transforme la base canonique (qui est orthonormale) en une base orthonormale.
Donc
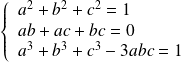
est orthogonal si et seulement si les vecteurs colonnes de la matrice sont unitaires et deux à deux orthogonaux.
Conclusion :
est un endomorphisme orthogonal si et seulement si
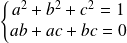 .
.
Question
Déterminer les réels
,
et
pour que
soit une réflexion. La préciser.
Pour qu'un endomorphisme orthogonal soit une réflexion, il faut que sa matrice soit symétrique et que son déterminant soit égal à
 .
.
est une réflexion si
est un endomorphisme orthogonal indirect,
 et si
et si
 est symétrique.
est symétrique.
Or
est symétrique si et seulement si
 .
.
Donc la condition pour que
soit orthogonal devient :
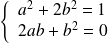 , donc :
, donc :
 ou
ou
 .
.
Le premier système ne donne pas une réflexion car :
 .
.
Il reste donc deux cas :
 ou
ou
 .
.
On peut remarquer que les deux matrices correspondantes sont opposées, donc un seul des deux cas correspond à une réflexion.
Or :
 .
.
Donc seul le premier cas donne
 , donc correspond à une réflexion.
, donc correspond à une réflexion.
Conclusion :
est une réflexion si et seulement si :
 et
et
 .
.
Alors la matrice de
est :
 .
.
L'ensemble des vecteurs invariants est l'ensemble des vecteurs
 tels que :
tels que :
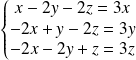 .
.
Conclusion :
est la réflexion par rapport au plan d'équation
 .
.
Question
Déterminer les réels
,
et
pour que
soit une rotation vectorielle. La préciser dans le cas où
 .
.
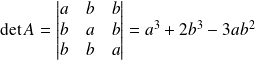
Calculez le déterminant de la matrice.
est une rotation si et seulement si
est un endomorphisme orthogonal direct.
Or :
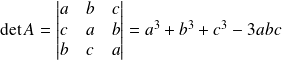 .
.
Donc
est une rotation si et seulement si :
 .
.
Or :
 .
.
Donc
est une rotation si et seulement si :
 .
.
Conclusion :
est une rotation si et seulement si
 .
.
Si
, on a :
 , donc
, donc
 ou
ou
 .
.
Si
 , la matrice est :
, la matrice est :
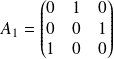 . Soit
. Soit
 l'axe de la rotation.
l'axe de la rotation.
 si et seulement si :
si et seulement si :
 . Donc
est engendré par
. Donc
est engendré par
 .
.
Donc
 est le plan d'équation
.
est le plan d'équation
.
Le vecteur
 appartient à
et a pour image
appartient à
et a pour image
 .
.
L'angle
 vérifie :
vérifie :
 , donc
, donc
 , donc
, donc
 .
.
Et
 est du signe de
est du signe de
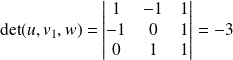 , donc :
, donc :
 .
.
Conclusion : Si
,
est la rotation vectorielle d'axe
orienté par
et d'angle
 .
.
Si
 , la matrice est :
, la matrice est :
 , donc
, donc
 .
.
Donc
est la rotation réciproque de la précédente.
Conclusion : Si
,
est la rotation vectorielle d'axe
orienté par
et d'angle
 .
.




