Nathalie Van de Wiele - Sup PCSI - 2001
nvdw@ac-nice.fr
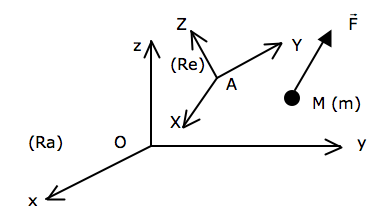
(Ra) est un référentiel absolu lié au solide de référence (Oxyz), supposé galiléen.
(Re) est un référentiel d’entraînement lié au solide de référence (AXYZ), en mouvement quelconque, de vecteur instantané de rotation , par rapport à (Ra), a priori non galiléen.
M est un point matériel de masse m soumis à la force .
Avec les notations usuelles, le principe fondamental de la dynamique dans (Ra) galiléen : , et la loi de composition des accélérations : , donnent : , c'est le
principe fondamental de la dynamique dans un référentiel (Re) non galiléen :
Mais les forces d’inertie ne sont pas « véritables » au sens où elles disparaissent si on traite le problème par application du principe fondamental de la dynamique dans (Ra) , ce qui est une autre façon de le résoudre. A ce titre, la forceest dite « force véritable ».
1. Précisons la notion de force d'inertie d'entraînement dans le cas d'un pendule à l'équilibre dans un véhicule entraîné par rapport au référentiel terrestre (galiléen avec une excellente approximation pour cette expérience), la force d'inertie de Coriolis étant nulle à l'équilibre relatif.
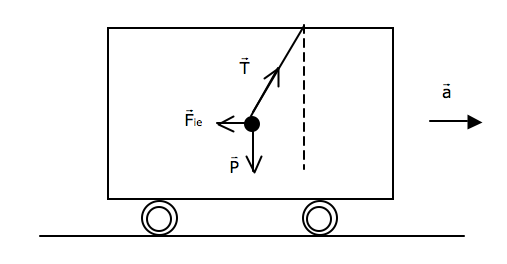
a) Cas d’un entraînement de translation d'accélération : .
C’est le cas où la voiture accélère en ligne droite sur une route horizontale. Pour une accélération constante l’équilibre relatif du pendule s’écrit : .
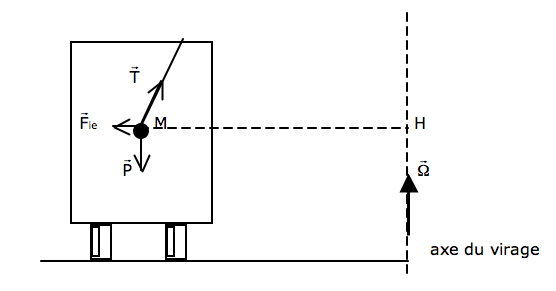
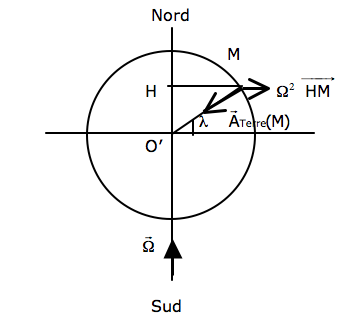
b) Cas d’un entraînement de rotation uniforme autour d’un axe fixe de vecteur : , H étant le projeté de M sur l'axe de rotation, la force d'inertie est centrifuge.
C’est le cas où la voiture aborde un virage à vitesse constante sur une route horizontale. L’équilibre relatif du pendule s’écrit : .
2. Précisons la notion de force d'inertie de Coriolis en faisant référence à lexpérience historique du pendule de Foucault menée en 1851 au Panthéon, destinée à mettre en évidence la rotation de a Terre autour de l'axe des pôles. A l’aide d’un pendule de longueur L = 67 m , Foucault observe une rotation du plan d’oscillation du pendule à raison d’un tour en 31 h 29 min .
Rappelons que :
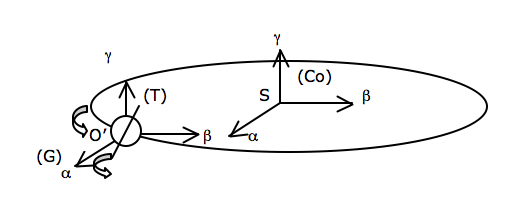
(Co) est le référentiel de Copernic, c'est le meilleur référentiel galiléen identifiable expérimentalement ;
(G) est le référentiel géocentrique, en translation elliptique quasi circulaire par rapport à (Co) , donc non rigoureusement galiléen ;
(T) est le référentiel terrestre, en rotation par rapport à (T) , donc
non rigoureusement galiléen, défini ci-après.
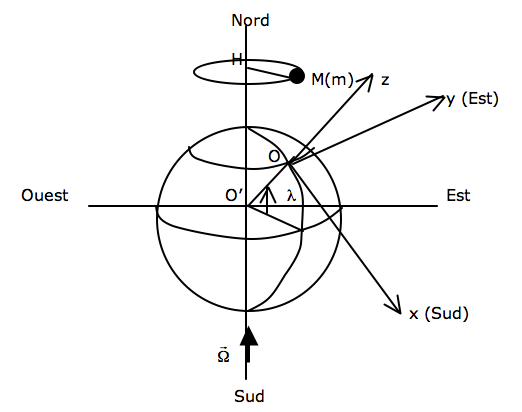
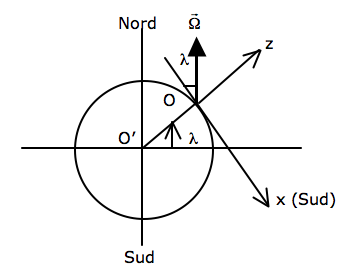
O’ étant le centre de masse de la Terre, le référentiel terrestre en un lieu O de latitude λ est tel que : définit , Ox est l'horizontale vers le Sud, Oy est l'horizontale vers l'Est.
La rotation de la Terre autour de l’axe des pôles est une rotation uniforme de vecteur ,
Dans l’entraînement du référentiel terrestre par rapport au référentiel géocentrique, l’accélération d’entraînement du point M est .
En reprenant la démarche précédente (composition des accélérations et principe fondamental de la dynamique dans le référentiel de Copernic, galiléen) nous verrons apparaître les termes d’inertie d’entraînement et de Coriolis.
.
Avec (notion de point coïncidant, avec (G) en translation par rapport à (C0)), et ((G) étant en translation par rapport à (C0)), on a :
.
Avec et , on a :
Par multiplication par m nous obtenons :
Le champ de pesanteur en M est :
Il contient :
Le poids est défini par , sa direction définit la verticale du lieu.
Le principe fondamental de la
dynamique appliqué à M dans le référentiel terrestre non galiléen
s’écrit :
(7)
Le terme d’entraînement est dans le champ de pesanteur, la force d’inertie de Coriolis est : .
Plaçons-nous dans le cas simple où un seul astre considéré comme ponctuel, en B , de masse , agit sur la Terre.
La terre est supposée parfaitement sphérique, de rayon , de centre O', avec O'B = d .
L’expression du champ = (G constante de gravitation universelle, vecteur unitaire de M vers B ), appliquée successivement enO', et (on effectue un développement limité en ) :
( unitaire : voir la figure).
Pour un modèle grossier de Terre-océan, on a deux marées, « sous » l’astre (voir la figure 2).

On calcule : : l'action de la Lune est prépondérante, mais l'action du Soleil n'est pas négligeable.
La Lune et le Soleil conjuguent leurs effets avec 4 situations remarquables :
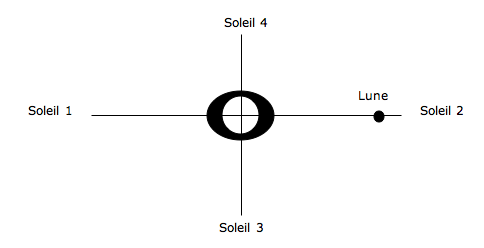
Le plan de l’orbite lunaire étant incliné de 5° sur le plan de
l’écliptique, les phases de la Lune correspondant à la position du Soleil
sont respectivement :
Soleil 1 : pleine Lune ; Soleil 2 : nouvelle Lune ; Soleil 3 : premier
quartier ; Soleil 4 : dernier quartier.
Action de la Lune :
On a deux marées par jour, chaque point de la Terre passant toutes les 12
heures sous un bourrelet (en réalité la direction Terre-Lune effectue un
tour en une lunaison (28 jours) et on a un décalage de 24/28 h = 50’ entre
deux marées consécutives).
Action du Soleil :
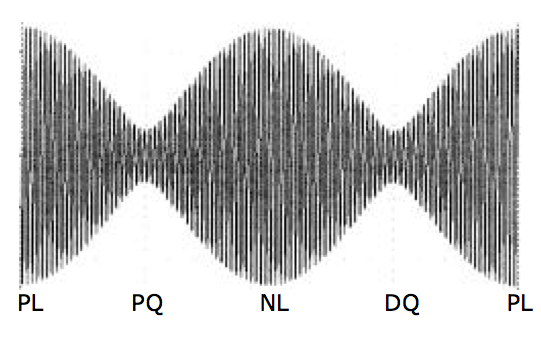
Lors de la pleine Lune (PL) et de la nouvelle Lune (NL), le Soleil accentue
le bourrelet dû à la Lune : ce sont les marées de vives-eaux.
Lors des premier quartier (PQ) et dernier quartier (DQ), le Soleil et la Lune tendent à créer des bourrelets orthogonaux : ce sont les marées de mortes-eaux.
L’amplitude des marées oscille autour d’une valeur moyenne et a l’allure ci-dessous :
En réalité :
c’est (un peu) plus compliqué et il faut tenir compte de phénomènes tels
que les phénomènes de résonance, comme par exemple dans la baie du Mont
Saint Michel.
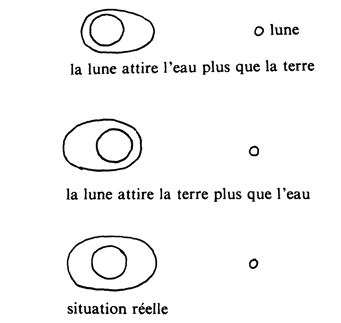
Richard Feynman, dans son livre « La nature de la physique » explique comment Newton résolut la difficulté qui restait dans la compréhension des marées, car « si la Lune attire les eaux, il ne devrait y avoir qu’une marée par jour, sous la Lune ... Newton fut en fait le premier à comprendre ce qui se passait :
la force que la Lune exerce sur la Terre et sur l’eau est la même pour une même distance, mais (voir la figure) l’eau est plus près de la Lune que la Terre solide sur la première vue, et plus loin sur la seconde. L’eau, sur la première vue, est attirée plus fortement vers la Lune que la Terre solide, et moins sur la seconde, de sorte que c’est une combinaison de ces deux schémas qui provoque la double marée ».
Dans ce qui suit on néglige le terme des marées dans le champ de pesanteur, alors (8) donne (9) :
Supposons la Terre à répartition sphérique de masse et M à la surface de la Terre et comparons la valeur du terme centrifuge maximal (à l’équateur) à celle du terme principal :
a pour valeur 9,83 et :
La direction de la verticale, définie par (9), passe pratiquement par le centre de la Terre et l’intensité du champ de pesanteur g(M) varie peu avec la latitude.
En tenant compte de l'aplatissement de la Terre aux pôles, dû aux forces centrifuges qui s'exercent sur le noyau fluide de la Terre : à l'équateur g est minimal et vaut ; aux pôles g est maximal et vaut . On peut prendre à la surface de la Terre.
Si on néglige le terme centrifuge dans (9) : , alors :
= m et pour une Terre à répartition sphérique de masse : ,
h étant l'altitude du point , étant à l'aplomb de , au sol. ( se note encore ).
Traitons l’exemple du sens des vents et courants marins à la surface de la Terre.
Considérons un point matériel M de masse m susceptible de se mouvoir sans frottement à la surface de la Terre, donc soumis à la réaction normale .
D’après la figure suivante, avec , et unitaires respectivement sur Ox, Oy et Oz :
.
D’après (7) : , le principe fondamental de la dynamique appliqué dans le référentiel terrestre à ce point s'écrit :
M étant dans le plan horizontal : => ⇒ ⇒=>
D’autre part, dans les simplifications précédentes : .
Avec finalement , le principe fondamental de la dynamique donne deux équations différentielles, dites couplées :
et
La résolution peut se faire « à la main », ou par un logiciel de calcul formel comme Maple.
Pour un vent de vitesse , selon Ox, au lieu O de latitude , la solution est :
et
La trajectoire est un cercle de rayon , parcouru à la vitesse v, dans le sens indirect dans l'hémisphère Nord , direct dans l'hémisphère Sud .
La force d’inertie de Coriolis est responsable d’autres phénomènes connus : déviation vers l’Est (dans les deux hémisphères) lors de la chute des corps, usure inégale des rails de chemin de fer, où elle intervient comme terme perturbateur.
Négliger l’influence du terme de Coriolis et ne prendre en compte que le terme principal dans le champ de pesanteur conduit, d’après (7), à l’écriture suivante du principe fondamental de la dynamique dans le référentiel terrestre :
Ceci revient à considérer le référentiel terrestre comme galiléen (sans terme d’inertie d’entraînement et sans force d’inertie de Coriolis).
La propriété d’impesanteur provient du fait que le mouvement des corps soumis uniquement à l’interaction gravitationnelle est indépendant de leur masse. Elle ne s’observe en toute rigueur qu’au centre de masse d’un véhicule en mouvement sous l’action des seules forces gravitationnelles.
Soit un astronaute, dans une cabine spatiale, moteurs arrêtés, monté sur un pèse-personne.
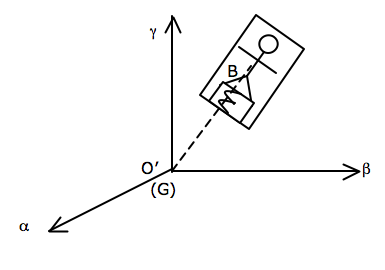
Supposons le centre de masse B de l’astronaute, de masse m , confondu avec celui de l’ensemble cabine-contenu, de masse M .
Le référentiel géocentrique (G) est supposé ici galiléen.
Le principe fondamental de la dynamique appliqué à l’astronaute, considéré comme ponctuel, à l’équilibre dans le référentiel lié à la cabine, non galiléen, et soumis aux forces « véritables » : action gravitationnelle de la Terre (on néglige celle des autres astres) et tension du ressort, s’écrit :
avec (point coïncidant) et (équilibre relatif), on a :
Le principe fondamental de la dynamique appliqué à l’ensemble cabine-contenu, considéré comme ponctuel, dans le référentiel géocentrique galiléen, et soumis à l’action gravitationnelle de la Terre (on néglige celle des autres astres), s’écrit :
=>
Par comparaison des deux relations précédentes, on a : : c'est la propriété d'impesanteur.
Cet effet pourrait se ressentir dans un ascenseur en chute libre, ou dans un avion en chute libre : c’est dans un avion dont les moteurs compensent l’effet de la résistance de l’air, l’avion suivant alors la trajectoire parabolique d’une chute libre, que les astronautes sont entraînés à l'impesanteur (avion A300 zéro G).
Remarque.
Tout au long de ce chapitre, nous avons implicitement admis l’identité des masses inertielle et gravitationnelle. La propriété d’impesanteur en découle directement.
Rappelons que cette identité constitue le principe d’équivalence, à la base de la théorie de la relativité générale, et postulé par Einstein en 1916.